Amb el vigorós desenvolupament de la indústria electrònica, la detecció de posició d'alguns components estructurals canvia lentament de la mesura de contacte original a la mesura sense contacte mitjançantSensor de posició Hall i imant. Com podem triar un imant adequat segons els nostres productes i estructura? Aquí fem una anàlisi senzilla.
En primer lloc, hem de determinar el material de l'imant. Actualment, l'imant de samari cobalt i el bor de ferro de neodimi s'utilitzen àmpliament en el sensor de posició de la sala. La principal diferència entre els dos imants és que, basat en el mateix volum, els imants de NdFeB són més forts que els imants de samari cobalt; l'excursió tèrmica del samari cobalt és menor que la del Nd-Fe-B; la resistència a l'oxidació del samari cobalt és més forta que la de Nd-Fe-B, però generalment hi ha un recobriment a l'exterior de l'imant, que pot resoldre el problema d'oxidació; l'imant de samari cobalt té una millor resistència a la temperatura que l'imant NdFeB, però el valor de resistència a la temperatura dels dos materials imants pot arribar a més de 200 ℃. Per tant, a l'hora de seleccionar el tipus d'imant, hauríem d'avaluar-lo en combinació amb el rendiment de costos, la temperatura de treball i l'entorn de treball. En general, NdFeB es pot utilitzar més, principalment perquè té les millors característiques de camp magnètic. Tanmateix, quan es treballa en un ampli rang de temperatures, es recomana triar un imant de samari cobalt a causa de la seva petita deriva tèrmica.
A més, hem de determinar alguns paràmetres bàsics de l'imant. Segons la informació de la posició de prova i la direcció de moviment de l'objecte, determinem si la direcció de magnetització de l'imant és diametral o axial. A més, es determina si cal seleccionar aimant quadrato aimant de cilindresegons l'estructura de la instal·lació. Per descomptat, de vegades hem de personalitzar la forma de l'imant segons l'estructura. Hi ha un altre factor de requeriment sobre el flux d'imants, que sempre ha estat la nostra preocupació en la selecció d'imants. De fet, l'hem d'analitzar en els dos aspectes següents:
1. La força del camp magnètic induïda pel propi sensor de posició hall i el rang de camp magnètic induït en cada direcció es marcaran clarament al llibre de dades del sensor.
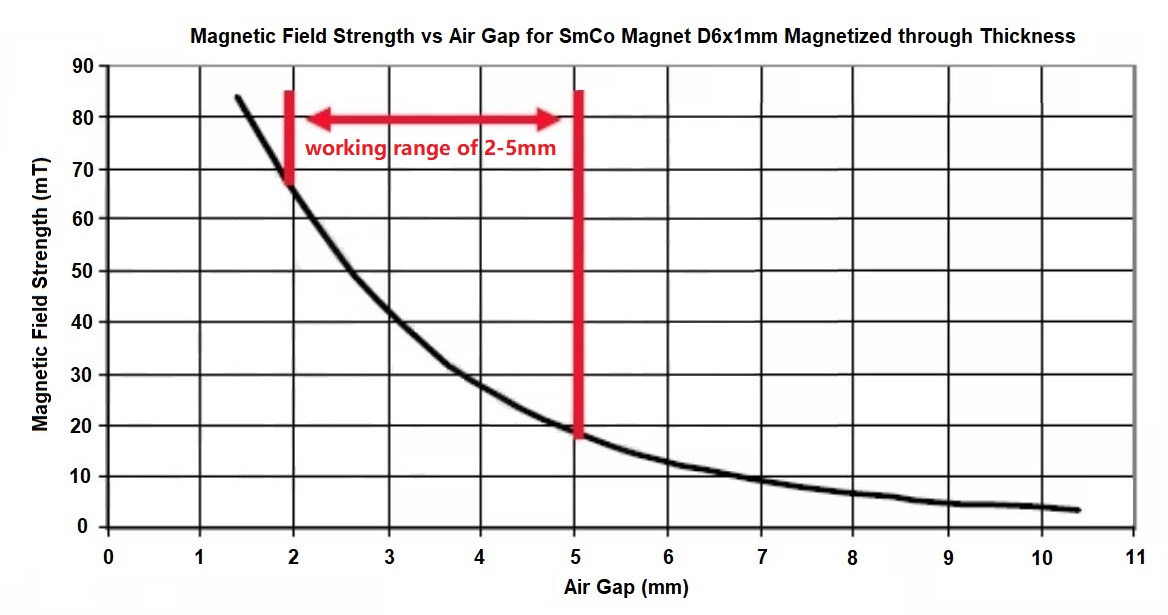
2. La distància entre l'imant i el sensor en si ve determinada generalment per l'estructura del producte. Segons els dos aspectes anteriors i la corba de canvi de camp magnètic de la figura següent com a exemple, podem determinar la força del camp magnètic de l'imant requerit.
Finalment, hem d'entendre que això no vol dir que mentre el camp magnètic caigui en els requisits de rang del sensor, l'imant pugui estar tan lluny del sensor. Tot i que el sensor en si té una funció de calibratge, hem d'entendre que quan l'imant està massa lluny del sensor, la distribució del camp magnètic en si és difícil de garantir la linealitat o propera a la linealitat. Això vol dir que amb el canvi de posició i la distribució no lineal del propi camp magnètic, la mesura del sensor esdevindrà complexa i el calibratge esdevindrà molt complex, de manera que el producte no té reductibilitat.
L'anterior és només una anàlisi senzilla de la selecció d'imants en aplicacions de sensors Hall. Esperem que us sigui útil. Si teniu altres preguntes durant el procés de desenvolupament, poseu-vos en contacte amb nosaltres,Ningbo Horizon Magnetics. Podem fer més comunicació i oferir-vos suport tècnic.
Hora de publicació: 12-agost-2021